Mikrokopter
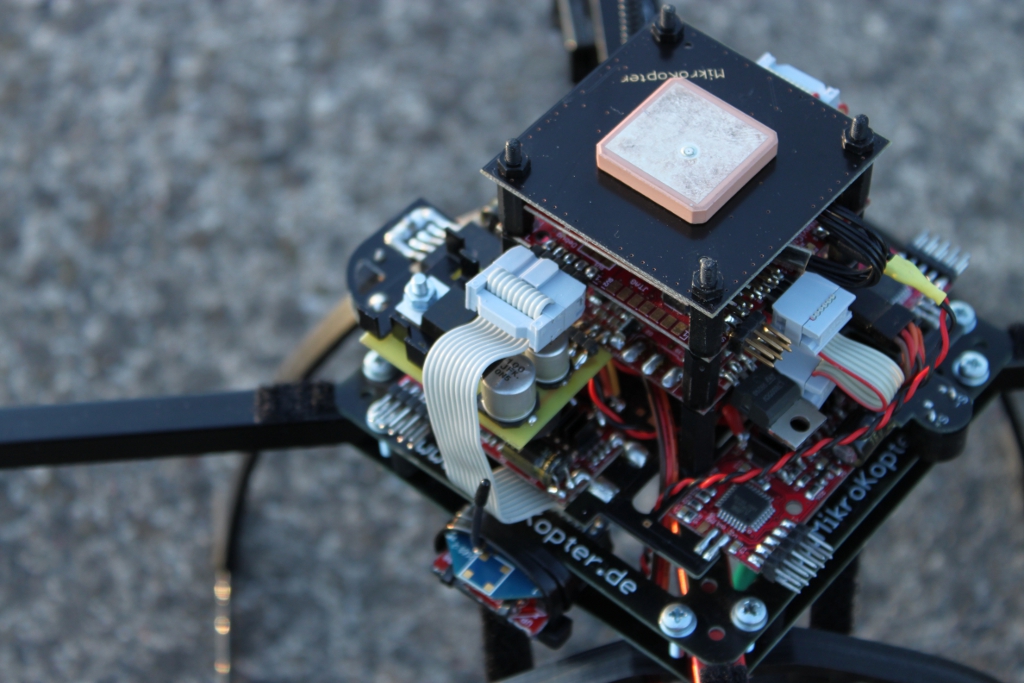
This is a quadrocopter built from a construction kit by www.mikrocontroller.com.


This is a quadrocopter built from a construction kit by http://www.mikrocontroller.com You find the complete documentation here: www.mikrokopter.de .
Wireless Camera

I'v added a small wireless camera which is attached to a servo. The servo is controlled by the controller board, so that it maintains it's vertical alignment, even if the pitch changes.
XBee Serial Communication
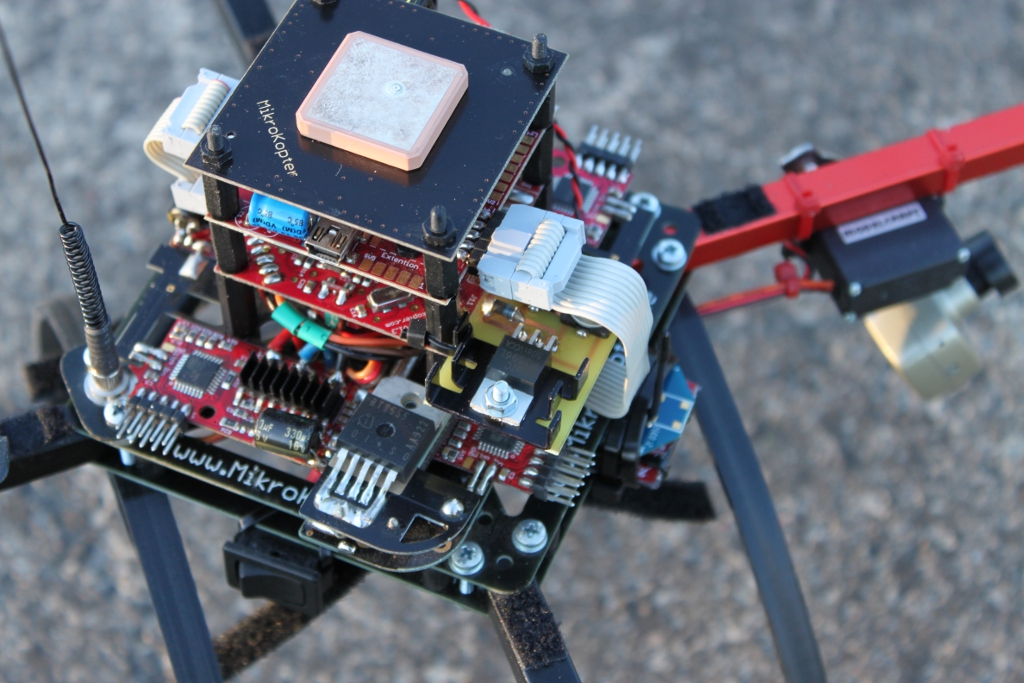
This quadrocopter has a serial connection over which it can be configured and monitored (with a program called MikroKopter-Tool ). For recording telemetry data during flight, a wireless serial connection is established between two XBee Series 1 modules .
The XBee module is placed under the bottom left strut of the center plate, below the text "kopter.de".
5V 3A Switching Regulator Replacement
Since the mosfets that are controlling the brushless motors can genrate a lot of heat loss, i've glued heatsinks to them. The same problem applies to the 7805 voltage regulator, which is replaced by a 3 amps switching regulator. This might cause problems with high-frequency radiation, but i haven't found any disadvantages so far.
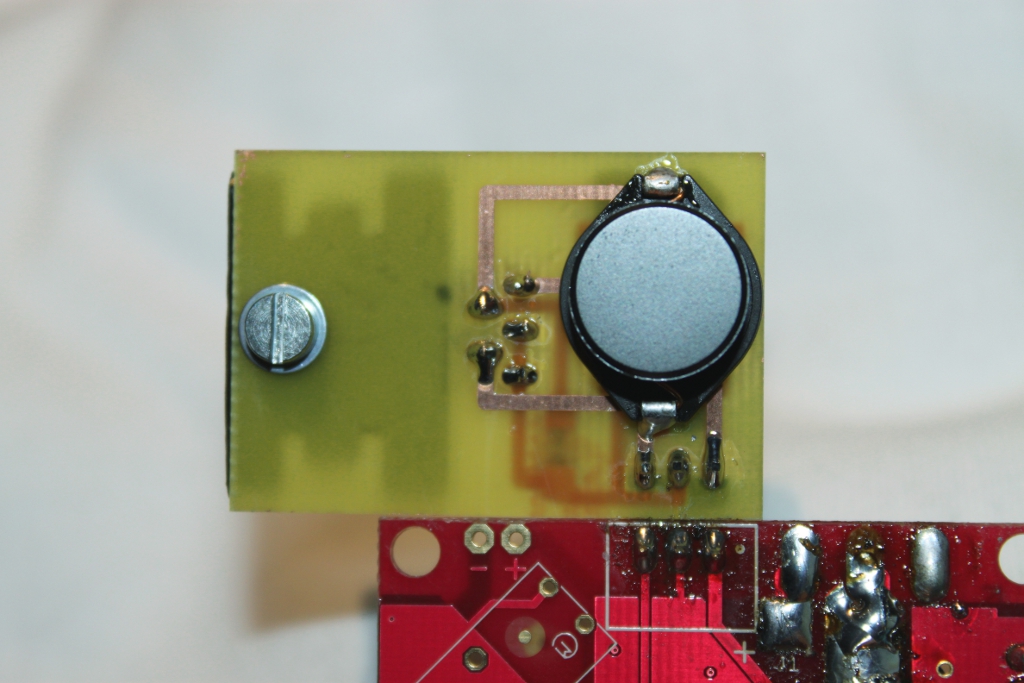

This voltage regulator uses a UTC P3596L in a standard circuit as described in the application note.