BeagleBot
On Coursera i've attended a course on "Control of Mobile Robots". During this course you could build a robot based on the BeagleBone Black and the RedBot from Sparkfun.
The control software was written with Matlab .
Since i had most of the electronic parts, a Pololu chassis and a Tamiya gear box already lying around, i decided to build my own variant of this robot.
On this page i'd like to give you a first visual impression of my robot. Later on i'll add setup instructions and download links for the software.
These two side views show the stacked construction of this cylindrical, differential drive robot:
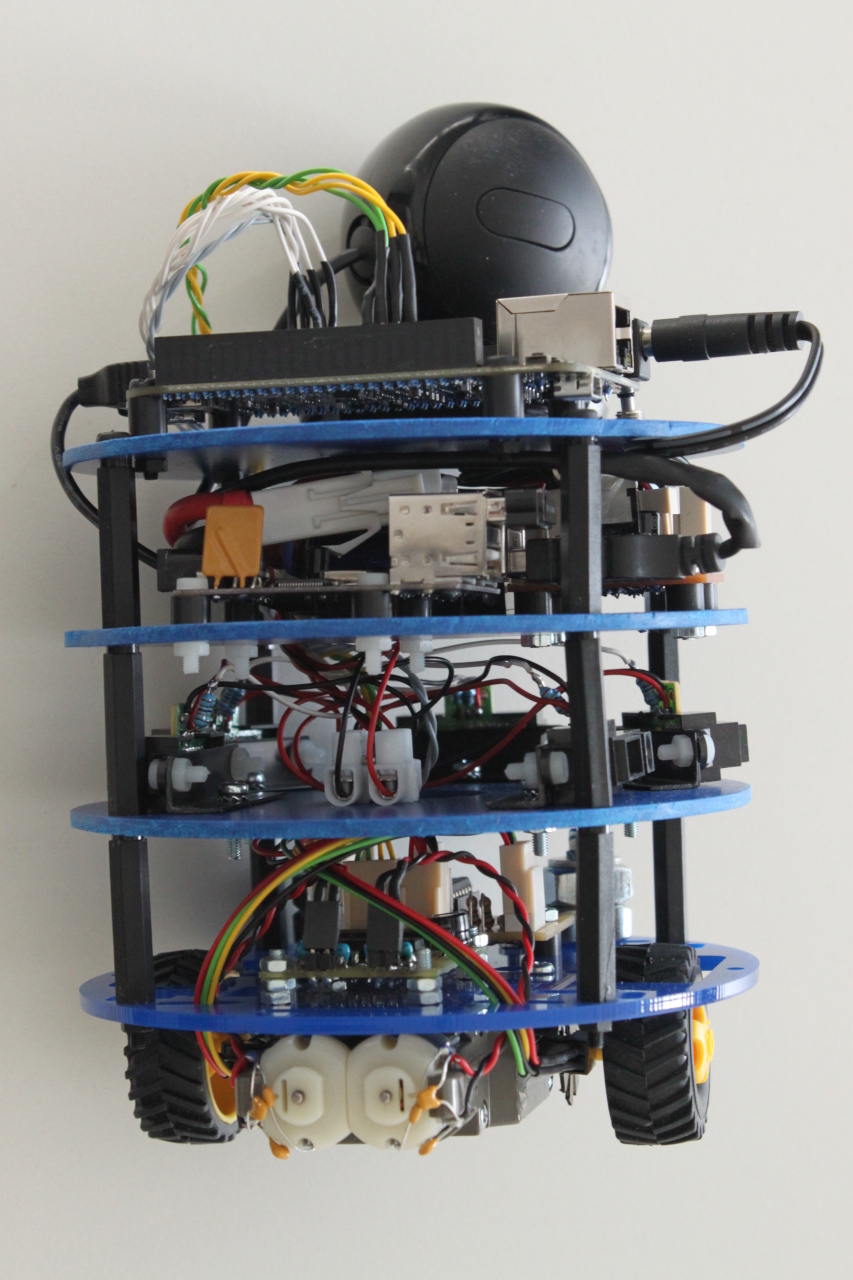
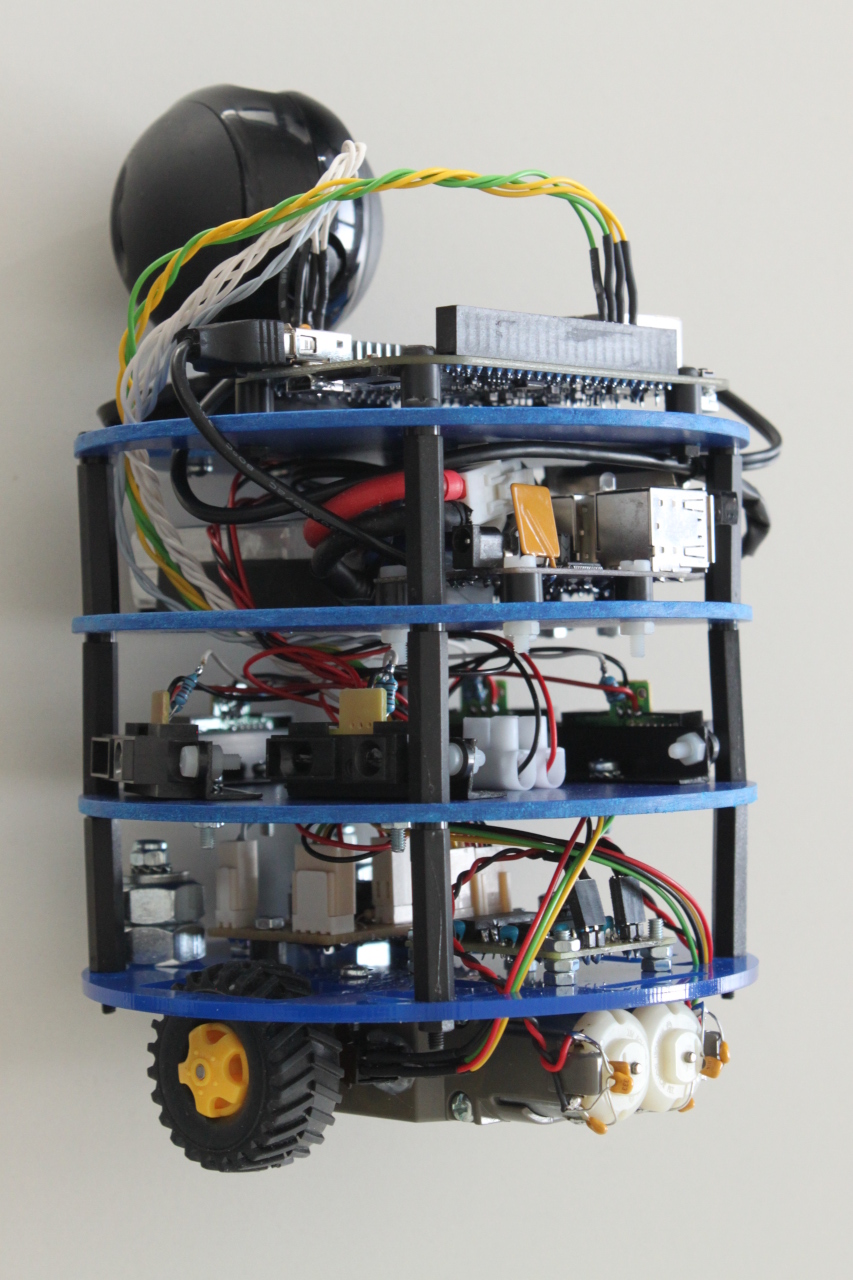
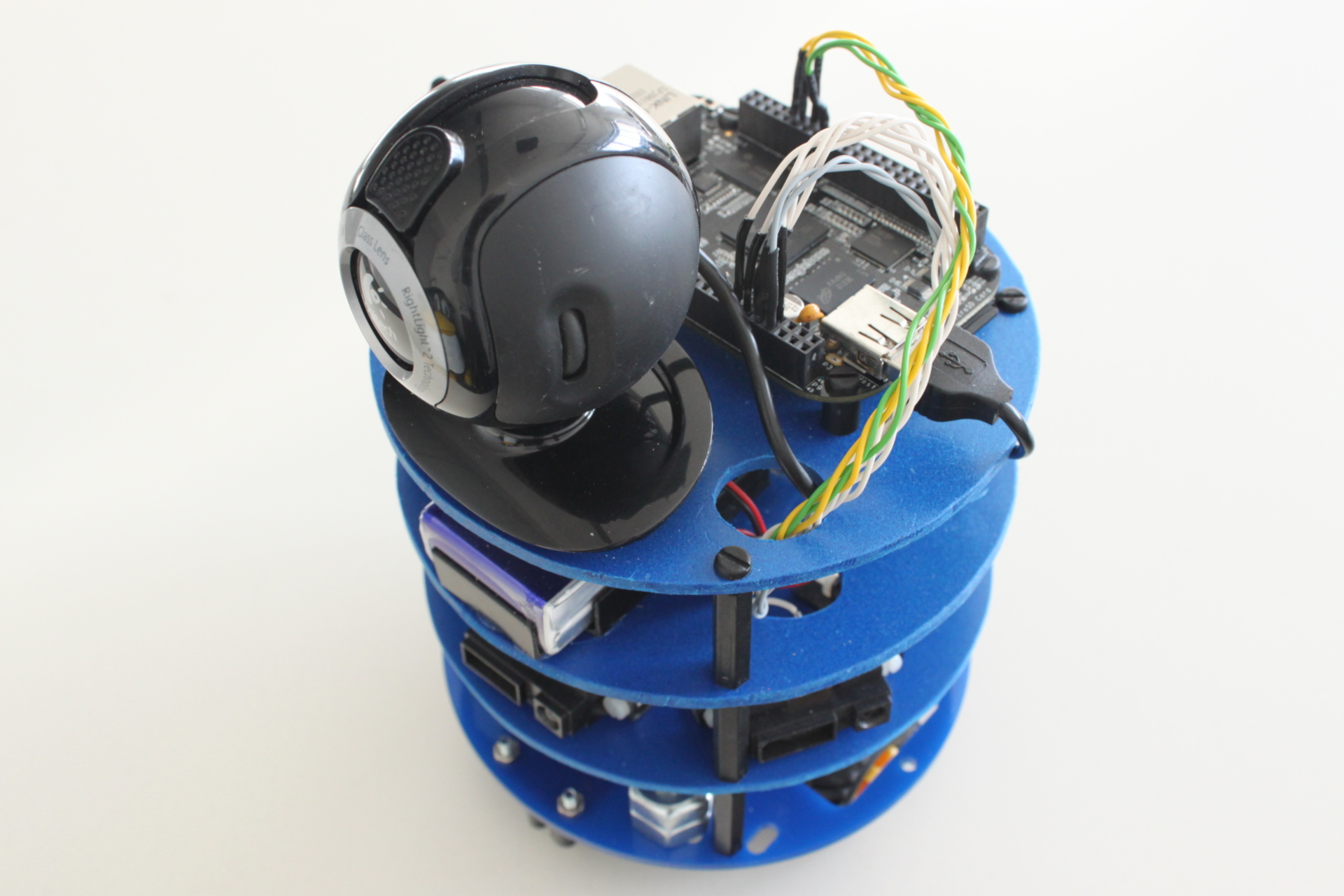
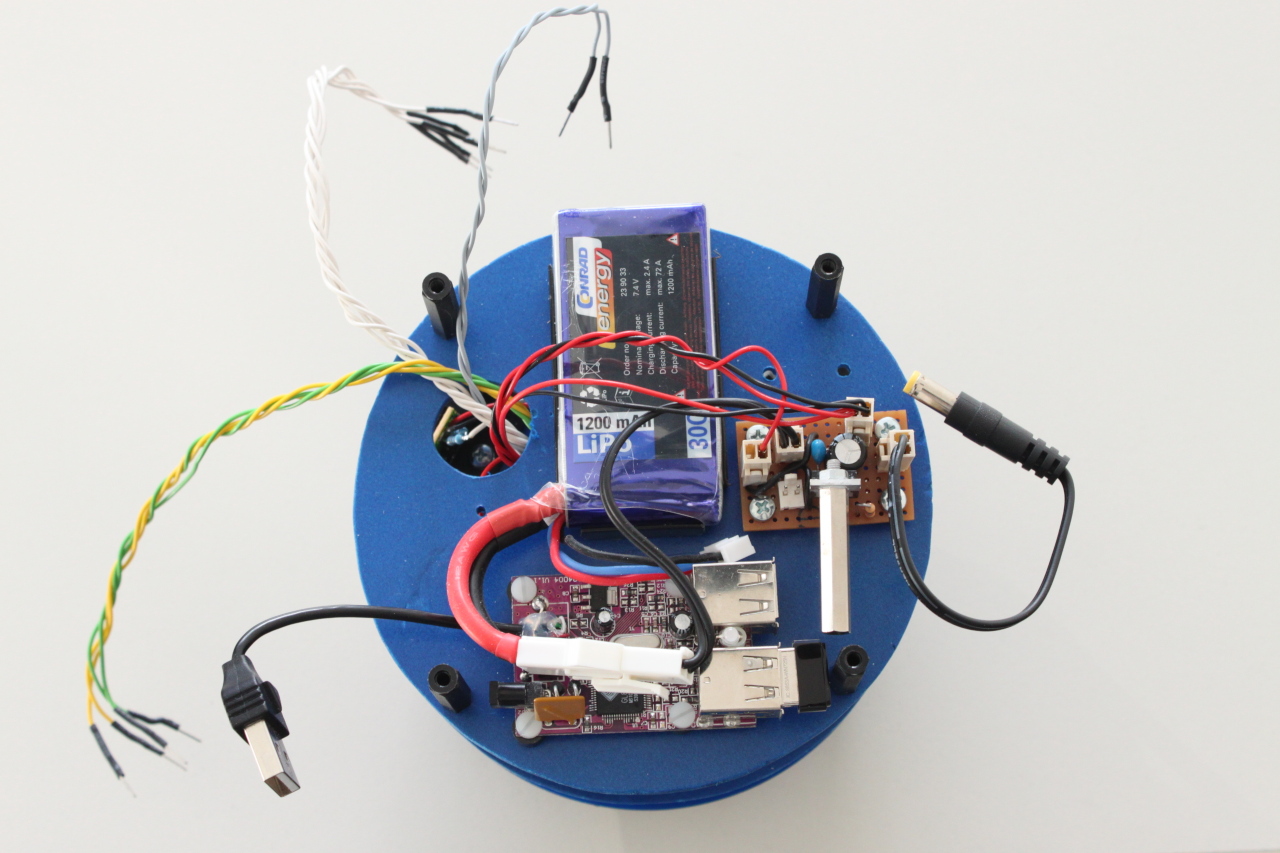
The top disk contains the BeagleBone Black, a webcam (not needed for the Coursera course) and the power switch:

On the next disk i placed the LiPo battery, the voltage regulator (a LT 1085 CT, 3A, low drop) and a USB hub (which is only needed to provide USB ports for both the WLAN stick and the webcam):
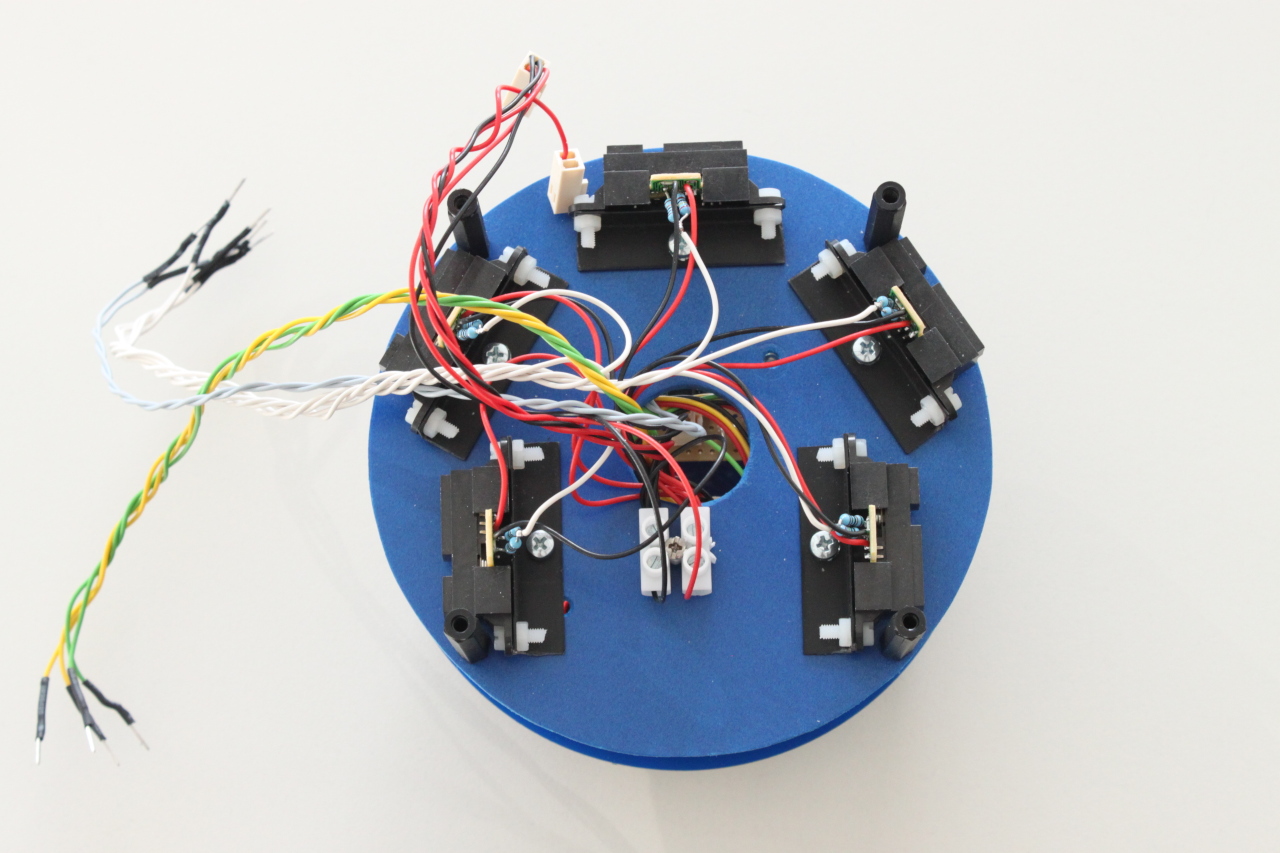
One level below is the sensor disk, containing five Sony IR distance sensors (GP2Y0A41SK0F). Each sensor has a voltage divider attached, to transform the sensor output voltage level to 1.8 V maximum:
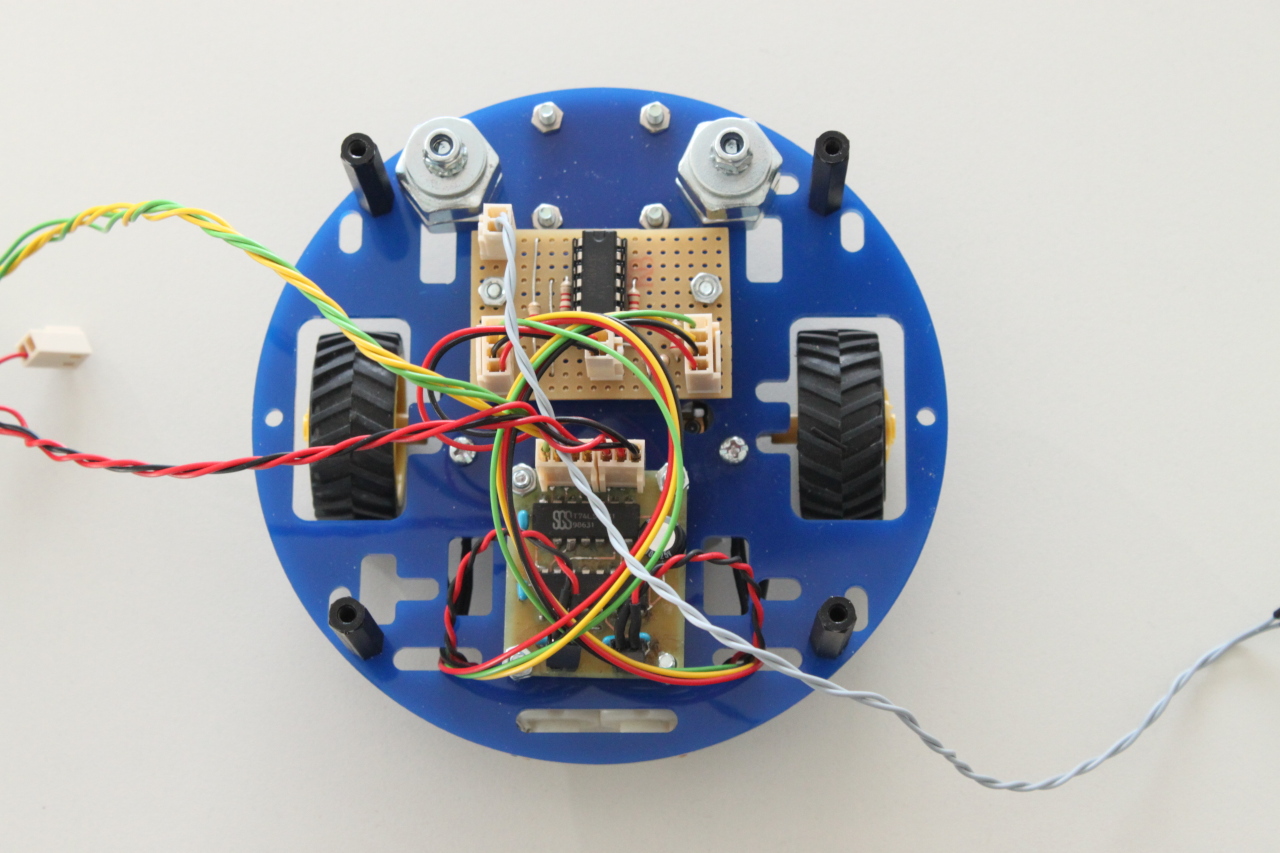
The bottom disk is the Pololu chassis which holds the motor H-bridge (L293D) and a Schmitt trigger (74HC14) for conditioning the signals of the two wheel encoders:
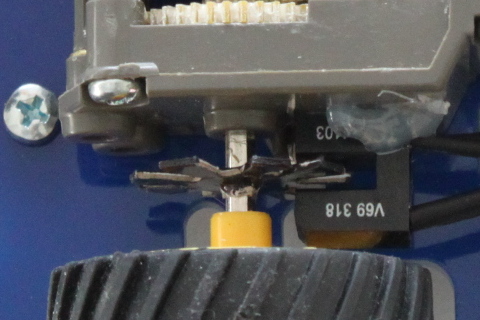
Eventually mounted on the other side of the chassis is the motor gear box with two wheel encoders (CNY36 photo interrupter plus 16 sector DIY encoder wheel) attached to it:
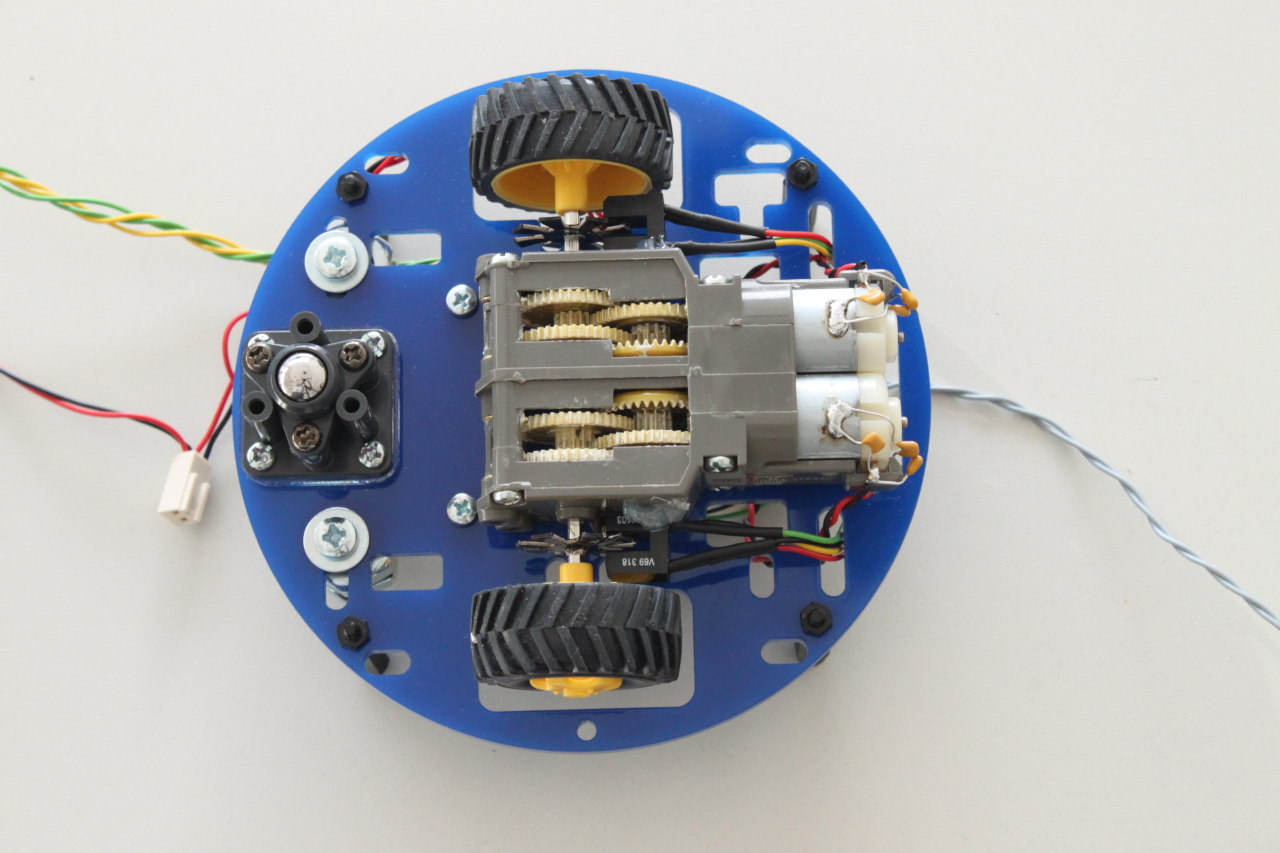
Here is a detailed view of one of the wheel encoders: